- Software
- IQANdesign
-
 Ideas
Ideas

0
Completed
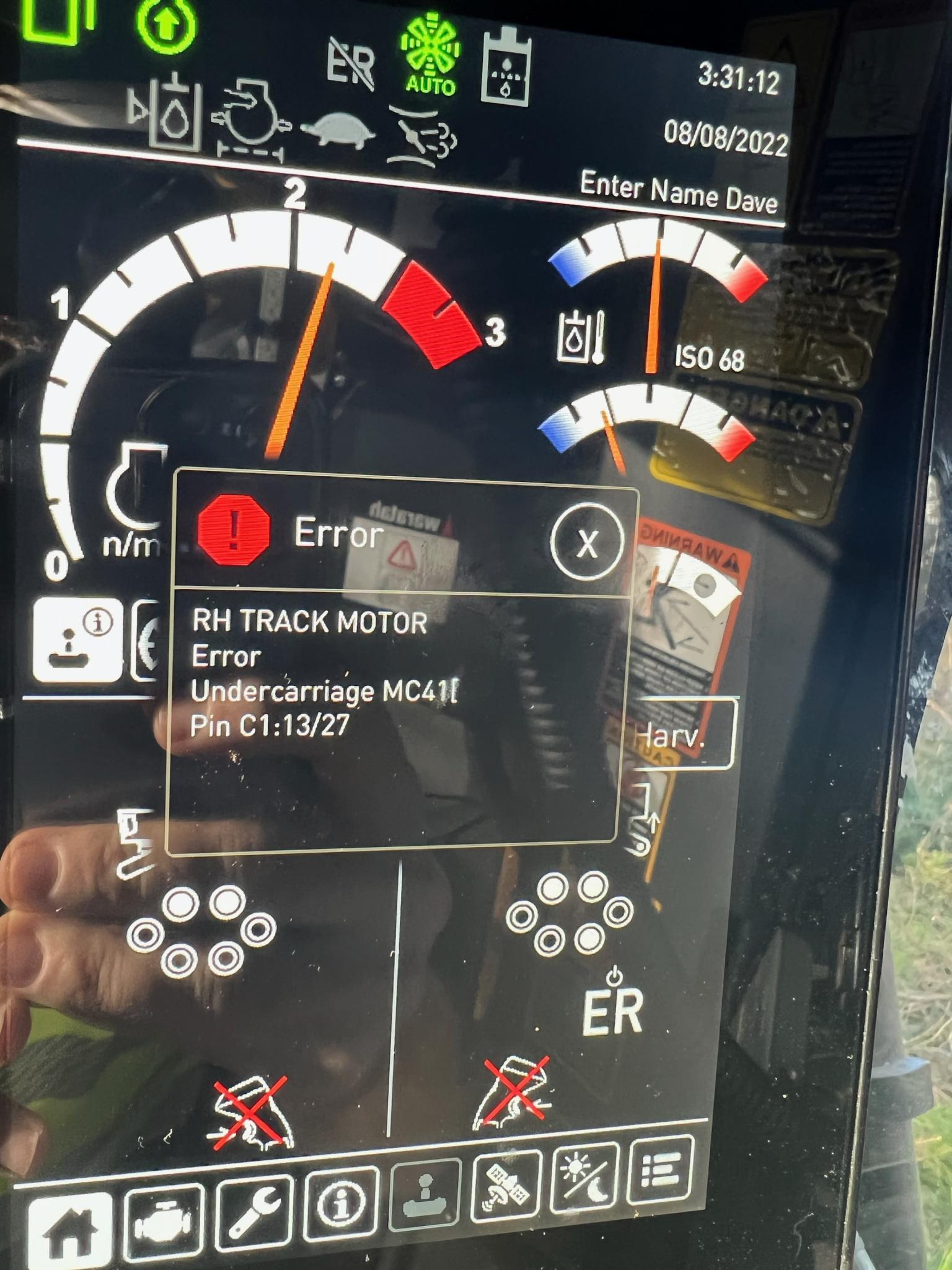
Prevent DFIN Quadrature Speed Sensor Error
Is there a way to prevent these DFIN speed sensor errors form showing on MC43' and MC41's - as they are intermittent and by the time you look at the channel they are working. It would be nice to be able to disable these messages in certain applications as they seem to only come up on the DFIN and not Frequency Inputs so they must be something to do with the error checking between the two signals. If we could have an adjustable setting for the error detection or be able to turn it off that would be ideal.
Customer support service by UserEcho

There is no property for disabling the DFIN error detection. Some time ago, we looked at the possibility of creating a software de-glitching function to filter out high frequency disturbances, but this has not been implemented.
How does the signal look? Have you been able to capture the signal on a scope when this error comes?
I haven't scoped it. It is running through a slip ring (electrical in the rotary manifold) on most machines - we are probably losing contact for a split second while swinging the upper (the speed sensors are on the track motors in the undercarriage). The speed sensors are used to set up the tracks and other than that are just tracking distance in each direction to monitor track life. If the ability was there to have a large window before this error shows up (the error message is very vague as to what the problem is as well).- we could get this functionality to work.
If you already know which direction the tracks are being driven maybe you could connect the sensors on single channel pulse count inputs without direction?
Then IQAN does no fault detection for you.
If you like you could add up the two channels on one sensor and see if they give similar number of pulses.
A temporary open circuit in the slip ring seems like a plausible explanation, probably when the machine is travelling.
The MC4x DFIN error detection is able to detect open circuit on the input signals, if one of the two signals drops out. It reacts if one signal is zero while the other keeps a frequency in the measurable range.
Modified topic title and change to Ideas.
Planned for 7.03.
Implemented in 7.03