Dout is only there because my new joysticks don't have signal contacts up/down as the old joystick had before to connect the plc inputs. That's no problem.
I don't want to have it running in full speed with hook up and reaching the limit it stops intermediately but with slope.
During simulation i can't see the slope the signal drops to zero instantly.
Did you check with IQAN Run or on the simulator menu page that slopes are actually active? Changing them in IQAN Design will not affect the existing application in your simulator.
I've just tried it to run the simulator and Cout was active and as soon the limit + Digital input from plc went from true to false the output signal drops instantly. I want to have it with slope to have smooth stop hook operation. same situation at jib. Even when i put the stop slope at 20000 ms it doesn't work at the simulator.
It seems to be working as wanted . Testing the application in real life at my workshop with two 42 ohm resistors at the output and limited max output current. Joystick from max position to neutral has same effect as joystick in max position and activating the limit switch. They use the same slope stop time which was set at 30000 ms.
When releasing from max to 0, the stop slope will kick. You'll have to check on site if this will not interfere with the operator's tact cycle. Attached is a simulated graph on 10 000ms coming back from 500mA to 250mA. When using shorter stopslopes of 250ms, it's not always visible while like at the values in IQAN simulate. Be aware at the end of stroke position to avoid mechanical stress. No ramp can cause peak stresses but to slow reaction at the endposition also (if no dampening present ) will make hydraulic pressure go up.

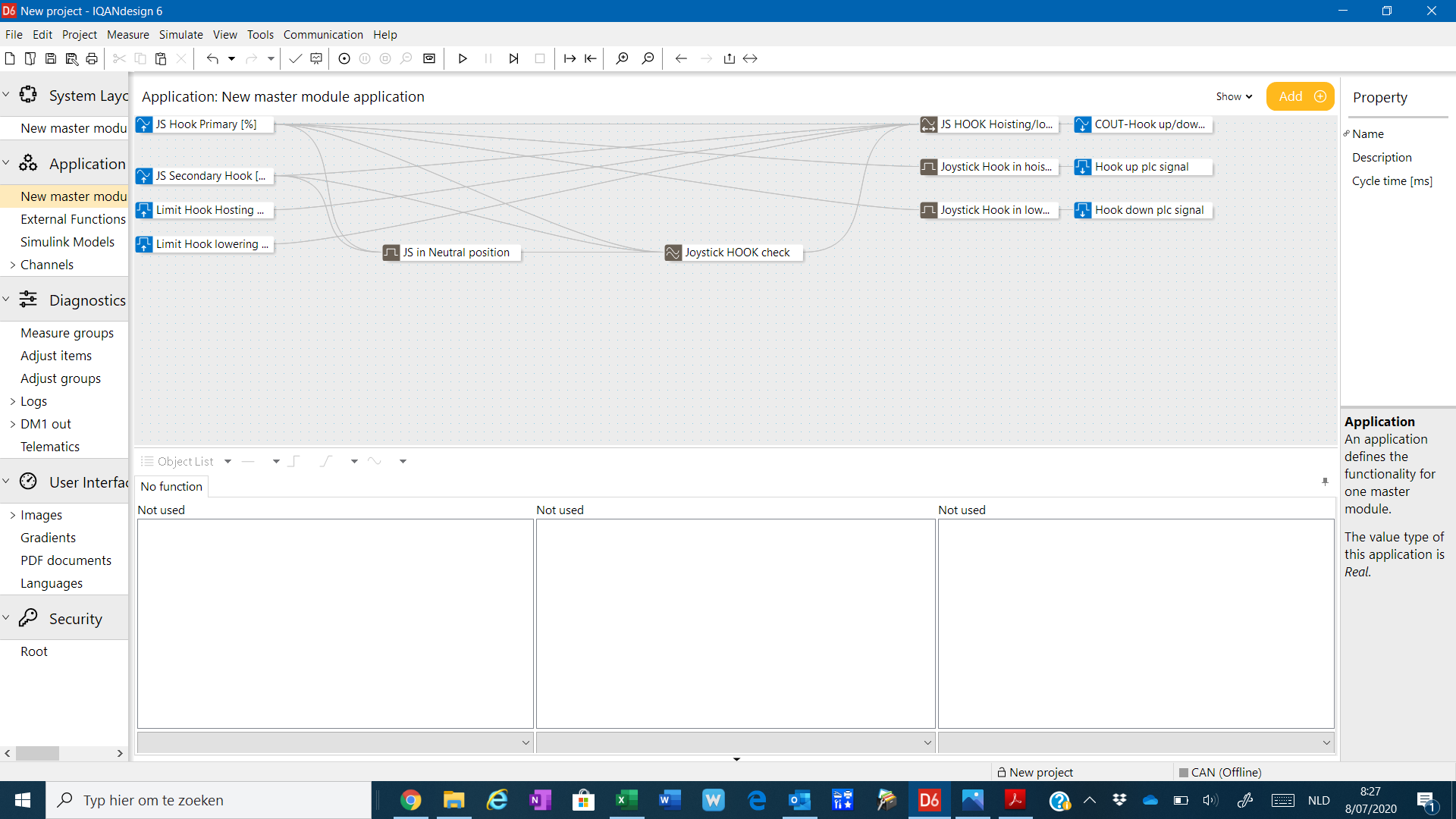

It looks as though the Hook Up/Down Command function is on both DOUT and COUT. Adding a slope on the COUT function is possible but not the DOUT.
Dout is only there because my new joysticks don't have signal contacts up/down as the old joystick had before to connect the plc inputs. That's no problem.
I don't want to have it running in full speed with hook up and reaching the limit it stops intermediately but with slope.
During simulation i can't see the slope the signal drops to zero instantly.
Did you check with IQAN Run or on the simulator menu page that slopes are actually active? Changing them in IQAN Design will not affect the existing application in your simulator.
I've just tried it to run the simulator and Cout was active and as soon the limit + Digital input from plc went from true to false the output signal drops instantly. I want to have it with slope to have smooth stop hook operation. same situation at jib. Even when i put the stop slope at 20000 ms it doesn't work at the simulator.
It seems to be working as wanted . Testing the application in real life at my workshop with two 42 ohm resistors at the output and limited max output current. Joystick from max position to neutral has same effect as joystick in max position and activating the limit switch. They use the same slope stop time which was set at 30000 ms.
When releasing from max to 0, the stop slope will kick. You'll have to check on site if this will not interfere with the operator's tact cycle. Attached is a simulated graph on 10 000ms coming back from 500mA to 250mA. When using shorter stopslopes of 250ms, it's not always visible while like at the values in IQAN simulate. Be aware at the end of stroke position to avoid mechanical stress. No ramp can cause peak stresses but to slow reaction at the endposition also (if no dampening present ) will make hydraulic pressure go up.