Have you tried working with the 'Latching and' for your internal digital channel (IDC) 'JS in Neutral Position'? That way this channel keeps true even after the Joystick has left neutral position. If possible you can add a seat switch or a door switch to activate. Preventing unsafe activating of the joysticks. Any fault that might occure you can put in the blocking object group.
(In the IQAN file example there is a crane application. The function group IQAN diagnotics shows different parameters you can monitor and try to include some of them, like Status of Voltage monitoring.)
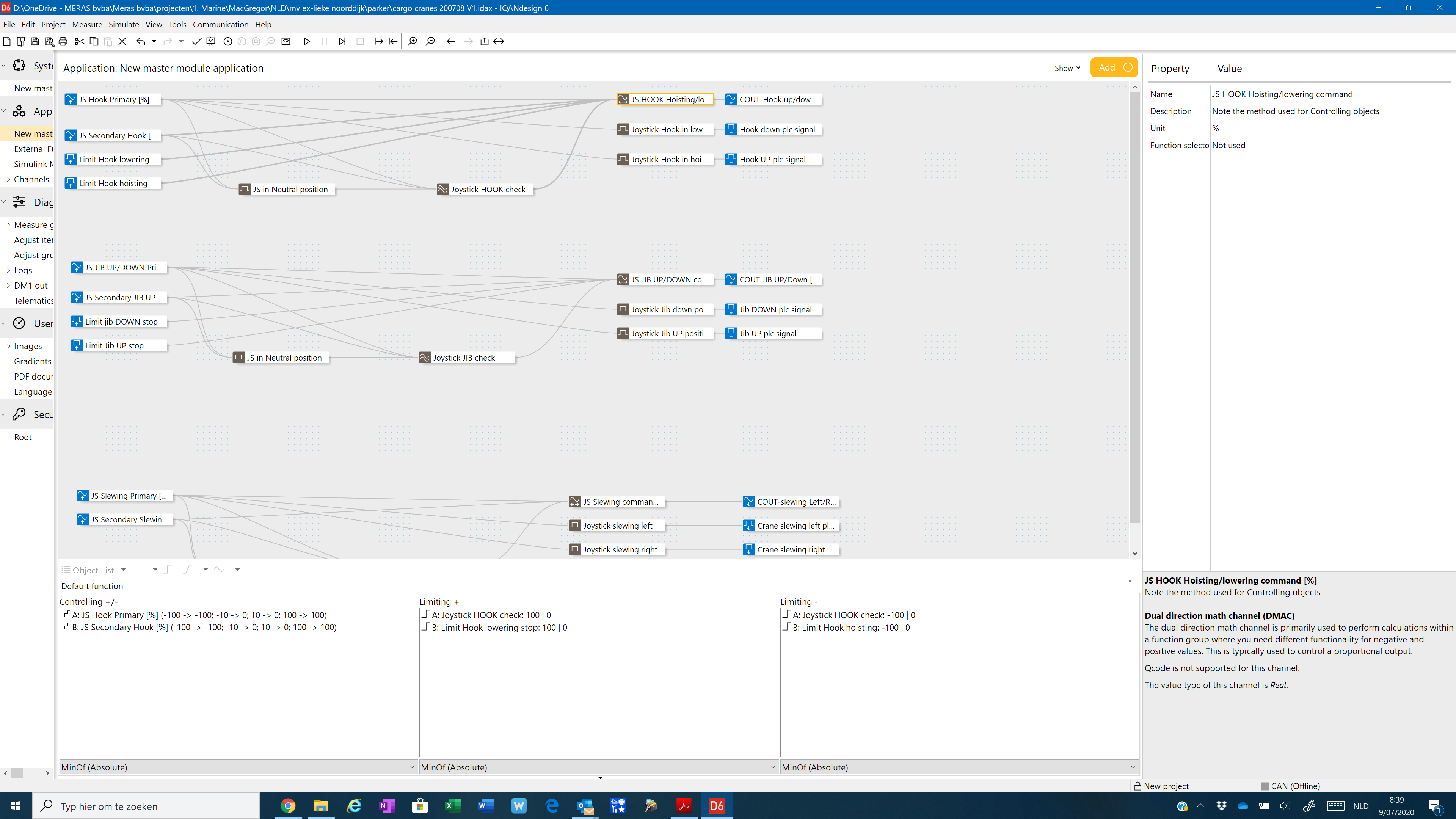
The analog compare channel you have in your picture also possesses a reset fault input. Where you prevent the 'Joystick Hook check' to be true unless all faults are resolved.
It seems to be working fine as shown at the picture. Motion stops when limit is activated and opposite motion is still working until reaching the other limit switch. When joystick is in max position and limit is deactivated the output signal is not coming back until i go to joystick neutral position and return to max position it works again.
From the printscreen it looks as if you have a compare channel. In that case, I'd recommend using the "OK to start" condition, and connect it to one IDC that just checks that the signals are withing netural. No need to work with the latching conditions on the IDC.
Gustav , Will this work with the two limits i need?
I tried it with the compare channel as instructed at the tutorials seen on youtube as i have it now with Ok to start with JC neutral but it stays active all the time because the condition is ok from the start. When i use jc + limit with IDC it works as a kind of reset and the crew onboard need to go to neutral before they can continue to operate the crane. Don't you agree?


Have you tried working with the 'Latching and' for your internal digital channel (IDC) 'JS in Neutral Position'? That way this channel keeps true even after the Joystick has left neutral position. If possible you can add a seat switch or a door switch to activate. Preventing unsafe activating of the joysticks. Any fault that might occure you can put in the blocking object group.
(In the IQAN file example there is a crane application. The function group IQAN diagnotics shows different parameters you can monitor and try to include some of them, like Status of Voltage monitoring.)
The analog compare channel you have in your picture also possesses a reset fault input. Where you prevent the 'Joystick Hook check' to be true unless all faults are resolved.
It seems to be working fine as shown at the picture. Motion stops when limit is activated and opposite motion is still working until reaching the other limit switch. When joystick is in max position and limit is deactivated the output signal is not coming back until i go to joystick neutral position and return to max position it works again.
From the printscreen it looks as if you have a compare channel. In that case, I'd recommend using the "OK to start" condition, and connect it to one IDC that just checks that the signals are withing netural. No need to work with the latching conditions on the IDC.
Very similar to the method shown in one of the video tutorials, https://forum.iqan.se/communities/1/topics/2453-iqandesign-video-tutorials-on-functional-safety
Gustav , Will this work with the two limits i need?
I tried it with the compare channel as instructed at the tutorials seen on youtube as i have it now with Ok to start with JC neutral but it stays active all the time because the condition is ok from the start. When i use jc + limit with IDC it works as a kind of reset and the crew onboard need to go to neutral before they can continue to operate the crane. Don't you agree?