
LC5 Multiple Address Error on 2xMD5+MC43
Hi,
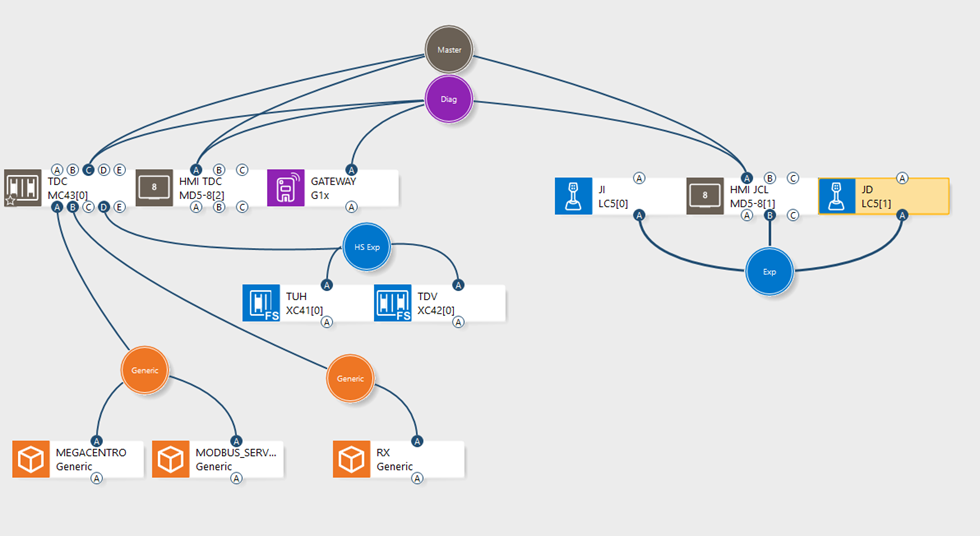
We have in a electric cabinet one MC43[0] with a MD5[2], then we have a wired console 30m away with other MD5[1] together with 2 LC5 joysticks.
The problem is on MD5[1], we make 3 diferrent connection to check:
1) We first connected the LC5[0]+LC5[1] on its CAN B port as usual in previus system with MD4 we made. But Randomly we gets:
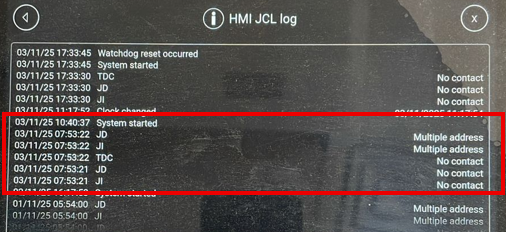
So we double check all the harware and wiring with no problem found. At this point was coneected 0T and 1T on each LC5
2) Then we connect one LC5[0] on the CAN B port, and the other in the LC5[1] CAN C port. Then we gets:
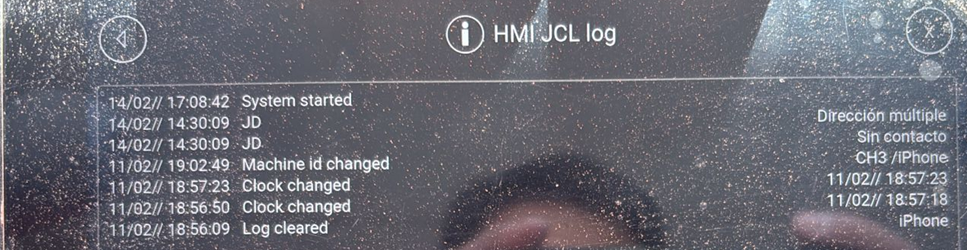
So the problem now is just on LC5[1], but with Multiple Addres Error even being alone in the CAN C port. At this point we added a 120ohm resistor on the MD5[1] to match LC5 termination resistors.
3) Then our last seting was LC5[0] on the CAN B port, and change the address to the other LC5[0] on CAN C port, so we gets:
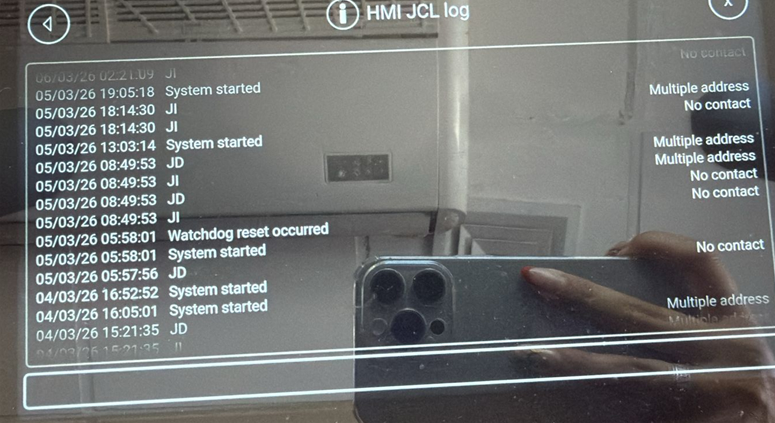
But in each port, there is only one LC5, so is not posible to have a Multiple Address Error.
The only way to make this work again is reset the whole system. This problem is happen in 4 diferent machines, all with MD5. Other machines with MD4 don´t have any problem.
Customer support service by UserEcho

I know one or our Parker application engineers already provided off-forum direct support on this a few weeks ago.
For anyone else seeing this post, I can say that I believe the problem may be due to fluctuations in MD5 cycle utilization and fluctuation in time between outgoing CAN messages.
It is a known problem/limitation with the MD5 that it does not have the same real-time performance as the MD4 or an MC4 controller.
This is one of the reasons we do not advise using the MD5 for machine control and instead recommend having all motion control logic on an MC4, preferably MC4xFS for safety.
The system layout here shows this is already a multi-master system with MC4, that should make it relatively easy to redesign.
Move the LC5 modules to the bus with the MC4, so the controller can get the values directly from the LC5s.
This should give a more predictable time between CAN messages and likely solve the multiple address issue. Other benefits include reduced busload (no need for appout) and reduced delay between command and output (not passing an in-between module)