
 Alarm Management
Alarm Management
Hello,
Is there a way to list all active alarms? I am looking for a mechanism to list all active alarms after the dialog boxes have been closed and for a easy way to determine if there is an active alarm after a dialog has been closed.
The Active Error Level SIC channel will only have a value of 1 (alarm) or 2 (error) if the alarms are NOT acknowledged. Once the dialog is closed the channel's value returns to 0 even if the alarm/error is still active. I like to use this status to turn on a lamp on the dash if any alarms/errors are present even if the dialogs have been closed and then provide the operator with a place to go to to look at all active alarms when that lamp is turned on.
Perhaps having the ability to connect the Reactivation property for System Dialog Boxes to a channel could be a means to force all the alarm popup to be displayed again by changing the time to 1s when the user presses a button, otherwise set it to some large value.
Thank you
 Active Display page reference
Active Display page reference
It would be nice if a display page could be used as a channel somehow. Say I want to disable something while on page 1, if I then reorder the pages it is no longer linked to the correct page. Also, a component navigator link from the SIC active display page to the pages would be helpful to trace functions that would be affected by changes to page order.
Precision Position (4-Byte)
I commonly use position data in my functions and some behaviors require precision latitude/longitude (4-Byte, 10^-7 resolution). This is an issue due to the limitations of floating points in IQAN. I have come up with a solution to this problem.
Most behaviors require 2 positions (vehicle position and desired waypoint). so you will have 2 sets of Lat and Long to deal with.
First you must keep the 4 bytes of each value split into 2 byte chunks until they are processed into relative position (a function in the below file). once the position is in relative space, the value is small enough to avoid any precision loss in the floating point form. you can change the inputs to make the origin either the vehicle or the waypoint.
The next issue is displaying real Lat/Long values (Not relative). The second function in the file is used to display 32 bit values that are split into 2 byte chunks. Without going into too much detail, it calculates each individual place separately and concatenated them in a text formatting function.
I'm sure that i am not the only one who may need these functions. I hope this helps anyone that may need them.

CAN transceiver reset
CAN bus latched failure status doesn't allow normal working before eather a software reflashing or a power reset. It's just unacceptable that the device crash and there is no way to reset it softwarely or even have this feature build-in in the low level firmware layers. Every other components can achive that "return to normal state" when the fault disappears.
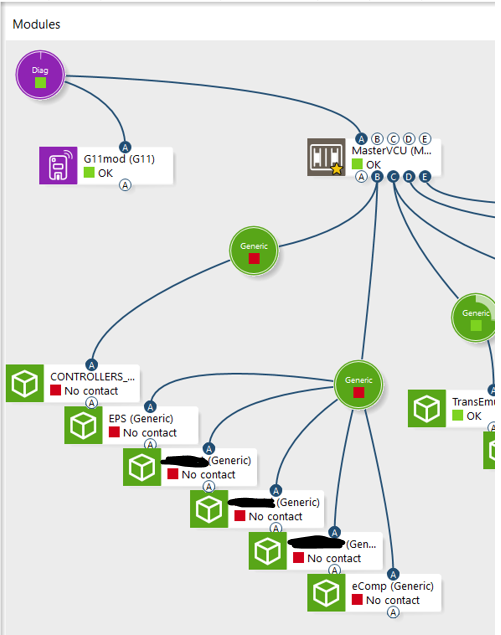
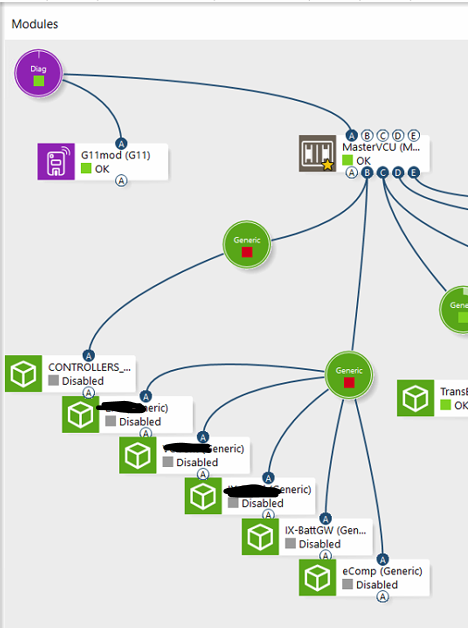
We tested it today by shorting can bus conductors together. We where expecting that disabling and re-enabling components would get them "back to life" for the Parker IQAN system. Finally not, the bus error stays (bus-off), other components of the system (Motors, battery and controllers) get back to normal state and keep "talking" despite IQAN MC43-FS device is still flagging "Timout" on their Can messages and "No Contact" on Can its message outputs.
It's major ! With actual safety related involvment !
By chance, that time it happened on a charging infrastructure so while the vehicle where immobilized, but what could we do if an error occures while the vehicle is circulating on the highway ?! It's just not acceptable to permanently lose power (by controlling a drivetrain) while the error / fault is gone. It must have a way to reset the bus !
Thanks for following-up !

Simplified IQANdesign renewal
Simplified IQANdesign renewal
The IQAN store “IQANdesign update subscription” is being replaced with a new option, IQANdesign license renewal.
Renewal gives the option to use your latest license number to purchase a new IQANdesign license (80% off), valid for updating to all IQANdesign versions released within 12 more months.
This is the same price as the previous subscription, but without the need to sign up beforehand and having emails from the store with reminders.
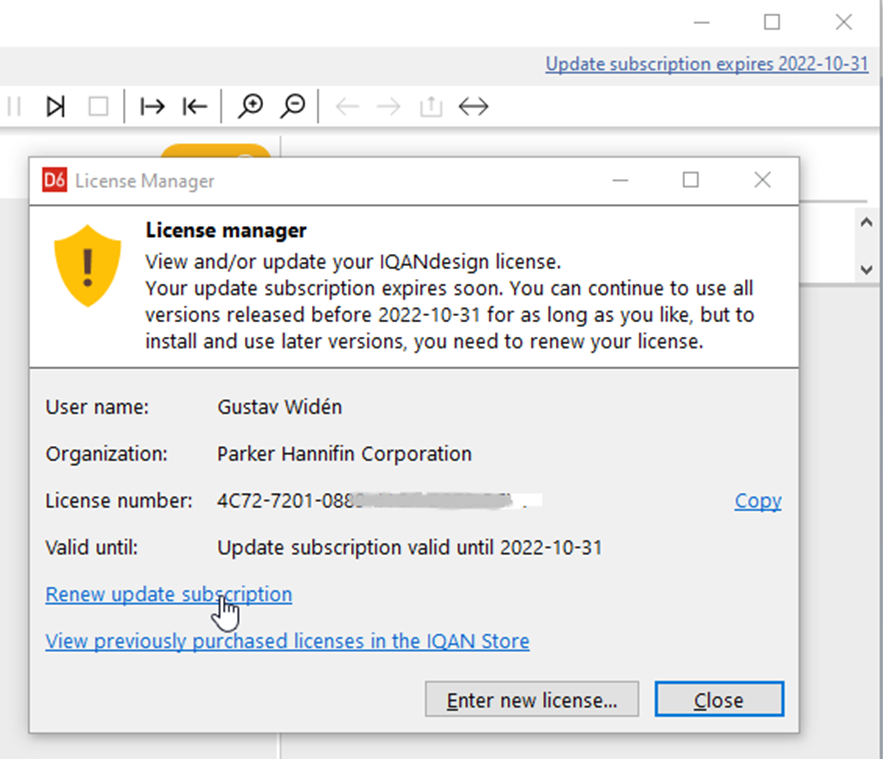
Manage license in IQANdesign
Two new release versions of IQANdesign are now available:
IQANdesign 6.08.25 and IQANdesign 5.08.2
In these versions, there is a new menu item:
Help > Manage License
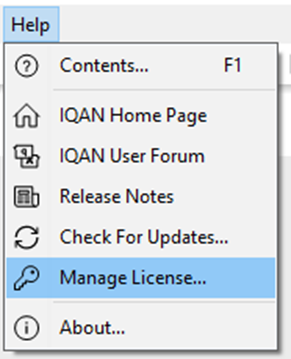
Manage License lets you view the full license number and enter a new one. If the current license is too old to install the latest updates, a link to IQAN store for IQANdesign license renewal is shown:
Update through help - check for updates serveraddress
Hello,
Inside the IQAN software there`s the check for updates option in the HELP menu. Our company has installed a new firewall and now updates are blocked. Can You tell me the serveraddress / port I have to whitelist to get these updates going again?
Thanks in advance,
André van der Heide

Small gui improvements IQANdesign
I have a couple of small requests to make usage easier.
When doubleclicking for example in a name field with two words it selects the 1 word you clicked on.
In other Windows programs or in this forum for example, triple clicking selects all words in the field/row, that would be handy to have in IQANdesign aswell. Especially when creating new channels with long default names like "Dual Direction Math" or when creating many states/text parameters for engine fault codes.
When clicking on a state function the last selected tab/state is shown, the name does not have a box around it so you can edit the state function name.
If you click on a state name then it gets a small gray box around it and you can edit it's name.
If you create a new state the name does have the small gray box around it, but if you type in a new name you will edit the name of the entire state function, this is opposite to the behaviour above.
 Flashing Issues when 500kbps Bus Exists in System
Flashing Issues when 500kbps Bus Exists in System
We have been seeing issues when sending projects to IQAN modules when a mix of 250kbps and 500kbps baud rates exist on the same module.
In our case, we have a multi-master system with (2) MC43 modules. The diagnostic bus on CAN-A for both at 250kbps. The modules are addressed as 0 and 1. The 0 address module has all CAN bus speeds set at 250kbps. The 1 address module has all CAN bus speeds at 250kbps, with the exception of CAN-C as 500kbps. CAN-C is connected to a truck engine bus that continues to communicate during the flashing process (data is always present on CAN-C whenever the MC43 is powered on).
When we attempt to send a project, the flashing process stalls once the module with a 500kbps bus is updated. This happens very regularly, and happens with IQAN Design 4, IQAN Run 4, IQAN Design 6, and IQAN Run 6. The process seems to get to the point where the 500kbps module is updated, but can't proceed to any additional modules in the system or finalize the process. This is very troublesome when remote flashing system updates via IQAN Go. Disconnecting the 500kbps bus prior to flashing does allow us to avoid this issue, but this step is often forgotten about by our service techs.
Is there a reason that the system stalls/errors out when flashing master modules with a mix of baud rates?
Auto-Sort Channels In Application Logic
Feature request for "Auto-Sort Channels" In Application Logic
Feature request to add an "auto-sort" or "auto-stack" option with selected channels in Application Logic view. A simple action, maybe in the right-click options. Something that will stack the selected channels one on top of the other. Instead of having to click and drag each channel (in the case there are many channels).
Just a thought :)
How to replace a master module in an existing project
Hi, I have a project built around a MC43. I would like to copy this existing project and replace the MC43 with a MC43-FS. How this can be done within IQANdesign?
Customer support service by UserEcho



