
 Can I have one piece of software that I can configure to use one of two different sets of control messages?
Can I have one piece of software that I can configure to use one of two different sets of control messages?
So in this scenario we have system A and system B, they are identical apart from component X which comes in variants I and II, I want therefore 1 software with a parameter I can set to say whether X is I or II. Now I and II use the same messages for some things but different messages for others, when using variant I then sending the messages used by II might be a problem, and vice versa so I really want to be able to switch whole messages on or off depending on the variant - perhaps to set the transmission method to on trigger and not trigger it and to switch the method for the ones I want to continuous with the right rate. I cant see how this is achieved in 'code', is it even possible?

J1939 transport protocol transmit rate
Making use of J1939 > COMPID enabled and J1939 > SOFT enabled on the MC43 with IQAN 6.08.24.8136 . Have encountered an issue where the Transport Protocol Data Transfer (PGN 60160) is occurring at too fast of a rate.
It was observed that the data packets for the COMP ID and SOFT ID messages is being transmitted at a rate of ~540us. The J1939-21 standard indicates a minimum of 50ms between packets.
This fast rate is causing issues with the receiving device, in particular handling the SOFTID as in this case it is 11 packets. The COMPID (5 packets) is being handled for the most part.
Is there a way that the Transport protocol packet rate can be set, or is this truly an issue in the firmware?
Parker Fork Lift High Tech font
Hello,
I am having issues with having a font appear properly.
When I use the Orbitron font it doesn't render properly.
The font is from the Parker Lift MD4-7 HighTech theme.
What is strange to me, is that when I open the example file,Parker Lift MD4-7 HighTech theme, the font renders properly, but when I add that font to a new project it does not render properly.
I have downloaded and installed the font from Google Fonts.
Any insight on why this could be happening is appreciated.
I'm using version Design 6.08.32.8219 and Simulate 6.08.22.6333

No uniCAN handle
I'm getting this error when downloading to MD5:
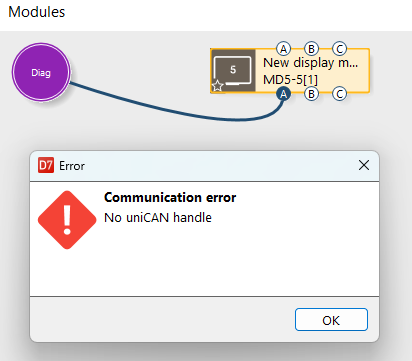
Trying to download software using NI 8473 but seems to error before even establishing connection with the display. I noticed the MD5 does not have built in resistor and I have not installed one as yet, could this affect the download from PC?
I would like to read certain parameters I will us in my control from a file
I want to be able to use 'constants' in my IQAN read from a file, for example perhaps using the same control system across multiple vehicles but having some vehicles with a lost maximum speed. One way I would use in other systems is a vehicle configuration file to rad the values from.
I saw the 'variant option selector' which sounded like it might be part way there but it complains it wants n option group and I have no idea how that works never mind if it is the right thing to use
Multiple messages with identical PGN
How do I capture messages in IQANdesign 6 (I can update if required for feature) with the same PGN? I have multiple pumps on one CAN network that feature J1939 style addressing, and each of these pumps has an identical status message in the .dbc file with the exception of their source address - the messages are PDU1 J1939 PGN. I have unsuccessfully tried importing these messages using CAN Generic Frame, but it seems IQANDesign overrides this and reads it as a J1939 Frame In and looks at PGN instead of extended CANID. How can I collect the information for each of these pumps separately in IQANDesign?
For reference, CAN IDs in HEX:
Pump 1 address = 0x18FF2301x
Pump 2 address = 0x18FF2302x
where PGN is FF23 on both pumps.

Disable DM1 on Bootup
Hello,
Is there way to disable DM1 Out on bootup for a period of time while everything starts? Same way logs can be disabled.
Thank you,
Gord
I have a requirement to send TSC1 to two different destination addresses
I did NOT design the messages required for this system so please dont blame me or tell me I need to change them, this is not in my control.
But the requirement is for TSC1 to go to destination 10 AND destination 90. I cant have 2 messages with the same PGN it complains, I cant see how to specify two destination addresses for one message. I am aware of 'broadcast' but do not believe at the moment the two components will pick up the broadcast rather than looking specifically for their own address.
Does anyone have a clue how I can solve this issue?
Shutting Off Engine With Timer
I have an application that has a seat switch timer. When the seat switch sees a negative flank and stays false for 8s, I would like the shutdown the engine. I have the shutdown JFIN configured but I am not sure how to go about sending a message to the engine to command it to shutdown.
I have a message that I need to add a checksum INTO...
The j1939 message/frame I need to create has a counter/checksum in it.
Now I can calculate the checksum using the constituent values of the frame (e.g. byte 1 is a 4 bit control type and a 4 bit mode), but I would rather use the bytes of the finished message so the checksum can be done more 'generically' without caring what is in those bytes.
So assume the output j1939 is called Fred maybe there is something like Fred.byte(1) or similar I can use in the maths, I cant see it but maybe someone knows of something I missed.
Then I would like the function (calcChecksum) to be available to ALL frames (Fred, Bob, Delilah...) without being rewritten - also dont really see how that can be done but at the moment until Fred.byte(1) etc. is sorted it doesnt matter.
Customer support service by UserEcho




