 Function Parameter with Mode selector
Function Parameter with Mode selector
Hi All.
I am using a function parameter with mode selctor and want to be able to update values via an MD4 display and using the adjustment screen. I don't seem to be able to display anything other than mode one as an option to adjust via the screen. Since a application update does not change defult values I can't now change my mode 2+ function paramater values. Anyone help with what I am missing please?

Diag bus on C or D
I get a hint that "CAN port C or D not recommended for diagnostics". Can you explain why and what issues may arise from this?

Bus utilization of XC4x modules in MC43 & MD5 system
We are planning on having 1 x MC43FS M24 with a single expansion bus loaded with 5 x XC43 modules. All the IO on each module is not used but it would be nice to have them all the same modules for consistency throughout the system. Is there any concerns with bandwidth with 5 modules on a single bus or is it worth cutting as many down to the smaller XC42 or XC41 where possible? They may have lower bus utilisation with the smaller variants?
Are all the 5 x busses on the MC43 range the same throughput? (MD4 for example had faster busses on A and B I think).
We are planning on 6 x MD5 connected to the MC43, and I have reservations about bandwidth also on the master and diagnostics bus.
Is CAN FD coming soon? hopefully this will ease my concerns as there is not any real way of calculating bus loads, only measure when the system is complete?
 Bluetooth disconnected scenario continues measure
Bluetooth disconnected scenario continues measure
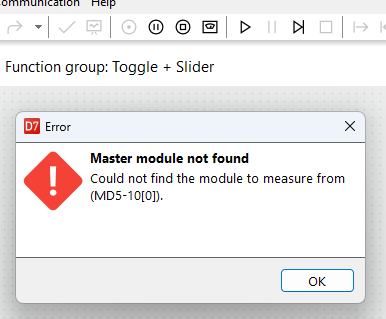
If a system gets switched off or becomes disconnected suddenly (interrupted Bluetooth) during measure in IQAN design, I have noticed that measure still remains active and design wont let you do anything until the measure icon is switched off. Initially took me a while to see what was happening as the comms toolbar (I was attempting to reconnect) was greyed out until the measure was unlatched. See measure icon below still active after disconnect and browsing to a page in the logic.
Weirdly it displays a simulator error after disconnect even though its actual hardware I was connected to:

If you disconnect manually using the comms menu it unlatched the measure, would be helpful if it did this also with comms failure.
IQAN Design 7.04

XC22 messages persist
i am getting system messages that say the xc22 module isn't found. then it powers up and works but messages doesn't go away. highly annoying for operators
Controller Capacity
Hello,
Where can we learn the capacity of the processor of the MC42-MC43 controllers, how much of it we use, and how much we need to use?
Function Group Deactivate
Hi, There are many function groups, I rewrote a function group. Can I run the other one without deleting that group? Or how can I deactivate that old function group?
Timer Channel
Hello, does the Timer channel send data only in 50 mS? Can we reduce this? We want it to do it more frequently. How can we do this?
Wire kit 20085205 missing Address wires for MD5?
Wire kit 20085205 does not have C1:31 and C1:45 for an address tag even though it is shown on the pinout. Is there an internal selectable tag? Do I need to manually add these wires?

math error
Hello,
I have an MD4-7 that I'm working with. On one of my screens I display GPS coordinates in decimal degrees and D.M.S. Sensor is external NMEA2000 device. While working on this screen I noticed that my Minutes display of Longitude did not correlate with the decimal display.
I've verified the GPS position I'm using as a sample against two other GPS receivers so I know what the correct position should be to within a few meters.
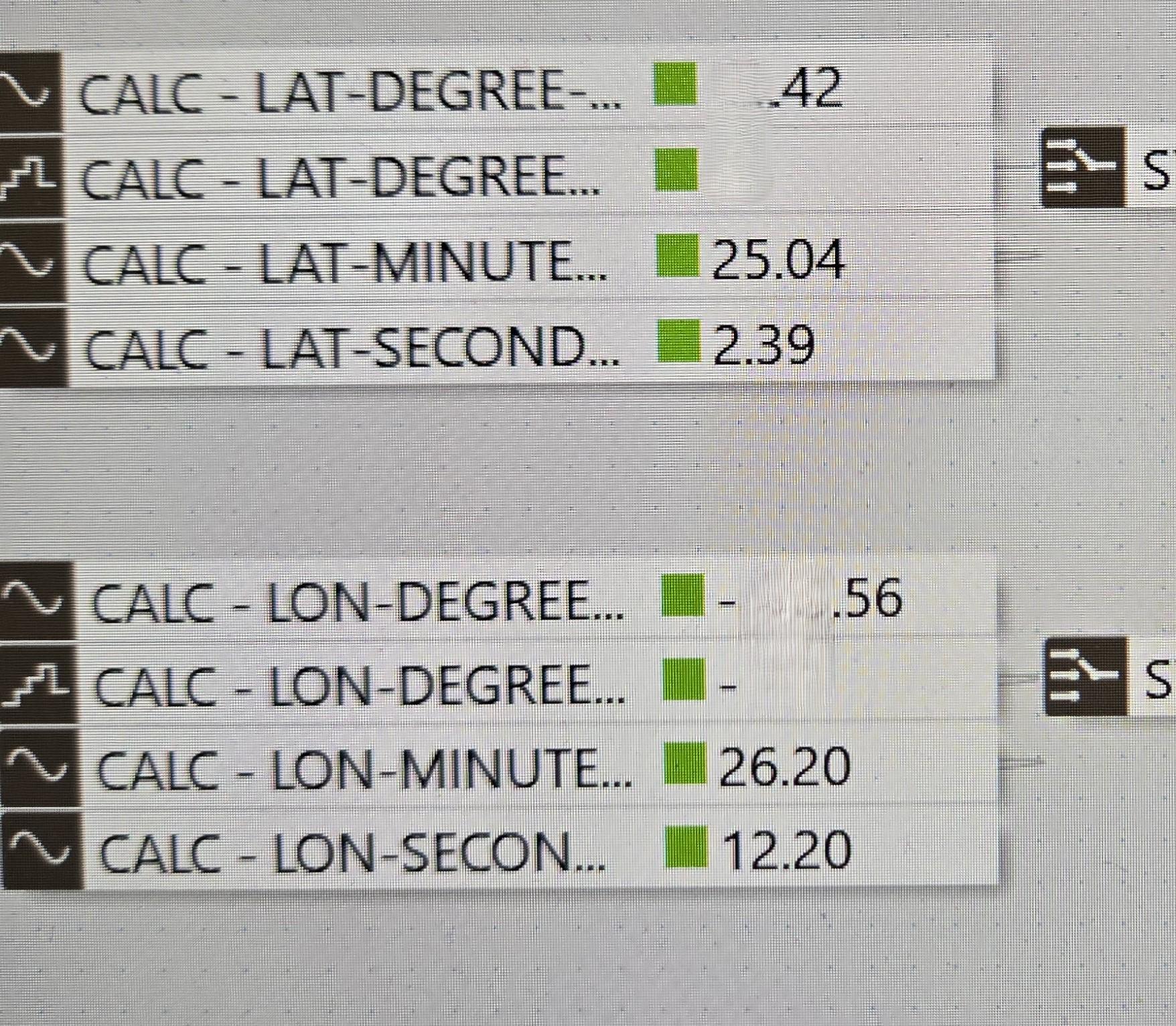
The incoming decoded decimal portion of the longitude position is x.56, and when multiplied by 60 should give me Minutes of 33 and change. The MD4 is displaying Minutes at 26
I've tried a couple different variants of the basic formula:
Result := (Longitude - floor(longitude)) * 60
Variant uses integer value from int math channel to subtract the integer part of the number.
The Latitude calculation is giving what seem to be correct results at first glance (the number displayed is "more" correct in terms of actual position), however, 0.42 * 60 = 25.2.
Am I doing something wrong with the number types? Is there some truncation/resolution issue in the background?
CALC - LON = raw decoded float value (NOT SHOWN)
CALC - LON-DEGREE-FLOAT (alternate math channel - troubleshooting)
CALC - LON-DEGREE (INT math channel - troubleshooting)
CALC - LON-MINUTES (longitude decimal minutes)
CALC - LON-SECONDS (longitude decimal seconds)

Customer support service by UserEcho




