
 Does 7.00 also have a fix for case 57049
Does 7.00 also have a fix for case 57049
Does 7.00 also have a fix for ref case 57049 (IQAN 6.08.24). Sometimes it is very difficult to get to the ID tag our machines so removing it takes a lot of effort. It would be very nice if a firmware update could be performed without removing the ID tag.
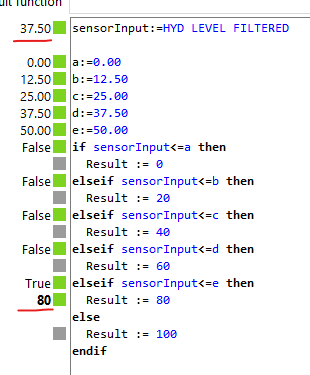
Incorrect Relational Function
Why does the below relational function evaluate incorrectly? sensorInput of 37.50 should evaluate to a result of 60. It does the same when I try using Object List.

IQANconnect goes free
As of mid February we have released IQANconnect so that no more connection fees apply.
The IQANStore is updated accordingly.
More information about how it works can be found here IQANconnect article
Have fun connecting!
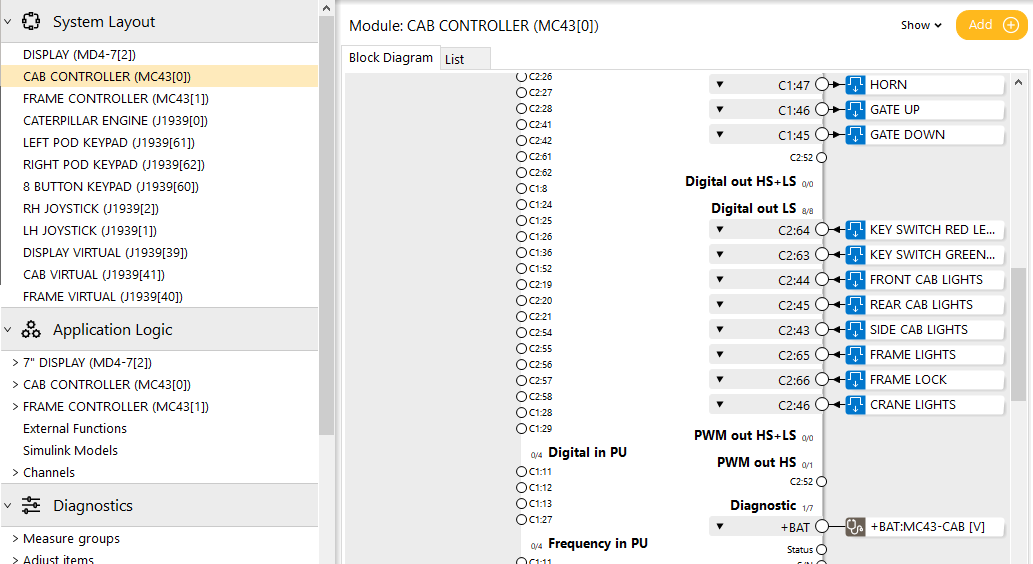
 Pop Up Error Message Discrepancy Between MD4 and MC43
Pop Up Error Message Discrepancy Between MD4 and MC43
I use IQAN 6 with this display and module. The error pop up message on the MD4 display does not relay the correct MC43 pin. If there is an open load on MC43 pin C2:46, the display shows open load on pin C2:65. The display gets the output name, error, and module name correct, but the pin location is wrong in the pop up.

Thanks,

MD4-7 loss of contact with MC43 issue
Hi, I have a system were I have a MD4-7 and MC43 in the system. Occasionally the MD4 starts displaying every second a loss of contact with MC43. i can see this being logged as well. the MC43 seem ok, no loss of contact with MD4. also I have checked the BUS, no errors no frame errors. all I can see that every time this MSG pops up the 0EF00 84->83 message stops, when the CAN message restarts the MD4 pop up message disappears. any help would be appreciated.

.
 Add milliseconds to log DateTime
Add milliseconds to log DateTime
Hey,
Not sure if this has changed in Version 7 but in Version 4, 5 and 6 the DateTime stored in Logs does not include Milliseconds. Since the Cycle Time is in Milliseconds, would it be possible to add milliseconds to the Log DateTime?
DateTime is currently formatted like:
2/20/2024 8:04:16 PM
Perhaps a format like this....
2024-02-20T20:04:16+0250
Or something along those lines.
Command line arguments improvements
would it be possible to have more Command line arguments available in a future update? some ideas are below
IQANdesign: having the ability recompile a converted idax file from txt back to idax.
IQANrun: having the ability to get a clone, Setting and log files from a machine. additional connection option with Bluetooth and sending an additional argument for the Bluetooth paring code.
As well as a help command to list all the options available for command line arguments. Additionally, having the user manuals have more information in for command line arguments. such as in IQANrun 7 there is no mention on how to use the IQANconnect key if connecting with IQAN connect.
Public scope channels referenced by logs give Qcode error "component name not unique" in 7.01
After I upgraded my program it generates an error, i use cycle time and the error stats that the the name is not unique. the is not the case, copying the code in a function in the application it will generate no error
code used in the evend log:

Same code but used in an ID in the application:

How to efficiently use both IQANdesign and Matlab together for application development?
How to efficiently use both IQANdesign and Matlab together for application development?
Since we have limitations of using matlab models with IQAN I'm
trying to understand/decide what part of application logic to be implemented in IQANdesign and what part to be implemented in Matlab.
Thank you in advance.
Veeresh

Static IP
IQAN Design 6.08
MD4-5 Master module
Simple application no code just for testing remote connectivity via telemetry gateway.
For some reason in Ethernet settings for the display I can not select and set Static IP, only default is available in the drop down selection. What am I doing wrong?
Customer support service by UserEcho



